姿勢分析は「パーツの寄せ集め」ではなく、重心(CoG)を真ん中に保つための連続調整を見抜く作業です。
その調整の仕組み=運動連鎖には再現性あるパターンがあります。本稿では前額面・矢状面・水平面の三方向から、評価と介入の勘所をコンパクトに整理します。
1|運動連鎖はなぜ起きる?
-
目的:重心を中央に保ち、筋活動コストを最小化するため
-
効用:不要な共同収縮が減り、**即応性(リバランス能力)**が上がる
-
逆に:連鎖のどこかが可動性低下/筋力不足/痛みで滞ると、遠位・近位へ過剰波及しやすい
2|三平面でみる運動連鎖(基本パターン)
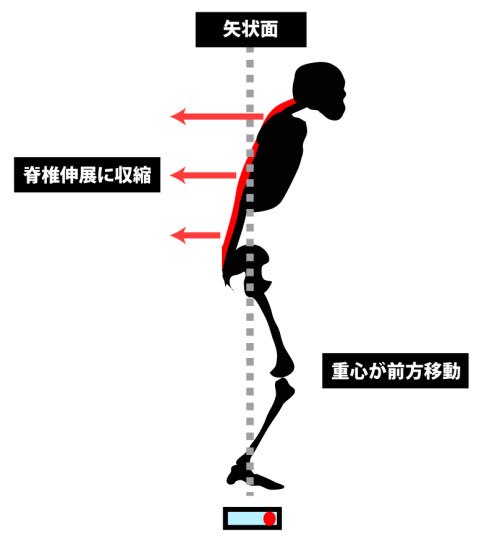
A. 矢状面(前後)

例:足関節背屈↑ → 重心 前方へ
→ 膝屈曲で戻す → 股関節屈曲 → 骨盤後傾 → 腰椎屈曲(後弯)
→ 前方化が大きければ頭部過伸展で最終補正
実際は、より近位の最小ユニット(膝・股・体幹伸展)で吸収されることが多い。
波及が頭部まで及ぶのは、主要節の可動性/筋力/疼痛に制限があるサイン。
B. 前額面(左右)

例:足関節内反(距骨下関節の内反) → 重心 外側化
→ 膝内反(機能的脚長差) → 股外転 → 骨盤傾斜(低位側へ)
→ 下位脊柱側屈 → 上位脊柱は対側側屈で戻す → 頭部はさらに逆方向側屈で正中維持
多くは膝・股で完結。骨盤・頭頸部に及ぶなら下位の調整余地が乏しい可能性。
C. 水平面(回旋)

例:足部の内反=底屈+内転
→ 下腿内旋 → 相殺で大腿外旋 → 相殺不足なら骨盤前方回旋 → 腰椎回旋
→ 上位脊柱は対回旋、頭部も対回旋で視線正中を保つ
3|連鎖が「止まる/止まらない」条件
-
止まる:近位の**可動域・筋出力・感覚入力(固有感覚)**が十分
-
止まらない:どこかでROM不足・痛み・筋出力遅延がある(高齢者の円背や圧迫骨折後は典型)
4|調整に失敗/成功したときの身体
-
失敗(重心ずれを筋収縮で代償)
-
易疲労性・動的バランス低下・転倒リスク↑
-
長時間保持が困難(持続的筋緊張で循環不良)
-
-
成功(連鎖で重心を戻す)
-
省エネだが、長期的には骨配列の偏位や筋の短縮/虚血を助長しうる
-
“戻せている=最適”ではない:原位へのリセンタリングが理想
-
5|評価ステップ(現場での使い方)
-
三平面スクリーニング
-
矢状:立位で足背屈↑時の体幹伸展の出方/出ないならどこで止まる?
-
前額:片脚立位で骨盤水平維持の可否(中殿筋 or 代償パターン)
-
水平:足部の内外転→下腿回旋→股回旋の連結の滑らかさ
-
-
最小限で重心が戻る節=主要節を特定
-
阻害因子を特定
-
ROM(関節/筋腱/筋膜)、痛み、筋出力のピークタイム遅延、固有感覚低下
-
-
テスト介入で可逆性を確認
-
例:足部内反に対し距骨下関節の外反誘導+足背外側荷重→ 直後の骨盤傾斜が減るか?
-
6|介入の原則(リハ設計の順序)
-
可逆性のある制限から:
-
軟部組織(短縮筋・筋膜滑走)→ 関節モビリティ → 痛みコントロール
-
-
主要節の安定化:
-
近位求心性(股関節周囲/体幹)・反応速度(中殿筋や深層外旋筋は特に)
-
-
重心リセンタリング:
-
足部~骨盤の荷重ライン再教育(立位・歩行でのフィードフォワード再学習)
-
-
不可逆要因(変形・固定後)には:
-
可動節のROM拡張+筋力強化+補装具で実用的中間位を確保
-
例:膝伸展制限が不可逆 → 足関節背屈・股伸展/外旋を拡げ、ヒップストラテジーを優先学習。必要に応じてソールウェッジ等で前後・左右の重心線を調整。
7|よくある誤り(つまずきポイント)
-
単一面だけで判断(三面セットで観る)
-
“見える代償”だけを消す(元の制限を放置)
-
筋力のみ強化してピークタイム遅延を放置
-
連鎖を頭部まで“均一に”波及する前提で考える(臨床はもっと局所完結)
8|ミニプロトコル(臨床でそのまま使える例)
-
中殿筋の反応速度低下×トレンデレンブルグ傾向
-
股関節内外旋ROM/股関節内転筋の過緊張を処理
-
50%1RM×高加速度の外転・外旋コンビ(レジスタンス短時間)
-
片脚立位で骨盤水平保持→軽度サイドステップ(鏡・メトロノーム)
-
歩行で速度を段階増加しながら骨盤傾斜の消失時間を短縮
-
Q&A(よくある質問)
Q1. 「正しい立位」はありますか?
A. 個人差があります。指標は省エネ性(呼吸・会話が楽)と微小外乱への即応性。三面で過剰代償が少ない立位を「あなたの正解」とします。
Q2. どこから治せばいいか迷います。
A. 最小介入で重心が戻る節=主要節から。テスト介入で変化が最も大きいところが「入口」です。
Q3. ROMと筋力、どちらを先に?
A. 痛み/ROM→安定化→再学習が鉄則。可動性なき筋力強化は代償強化になりがち。
Q4. 高齢者で頭部まで代償が波及します。
A. 体幹伸展の可逆性が低いことが多い。股・足での調整力を拡げ、必要なら補装具で静的中間位をまず確保。
Q5. 連鎖評価の時短コツは?
A. **足部(距骨下)→骨盤(水平/前後傾)→頭部(側屈/回旋)**の3点チェックをルーチン化。所要1分。
最終更新:2025-10-05